Erlang集群全联通问题及解决方案
原创文章,转载请注明: 转载自系统技术非业余研究
本文链接地址: Erlang集群全联通问题及解决方案
Erlang的集群默认情况下是全联通的,也就是当一个节点加入集群的时候,介绍人会推荐集群里面所有的节点主动来和新加入的节点建立联系,
效果如下图:
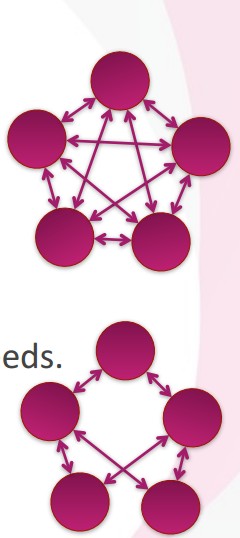
具体点讲那就是net_kernel模块负责节点间的通道的建立、检查、断开并提供monitor_node语义。
摘抄 http://www.erlang.org/doc/man/erlang.html 如下:
monitor_node(Node, Flag) -> true
Types:
Node = node()
Flag = boolean()
Monitors the status of the node Node. If Flag is true, monitoring is turned on; if Flag is false, monitoring is turned off.Making several calls to monitor_node(Node, true) for the same Node is not an error; it results in as many, completely independent, monitorings.
If Node fails or does not exist, the message {nodedown, Node} is delivered to the process. If a process has made two calls to monitor_node(Node, true) and Node terminates, two nodedown messages are delivered to the process. If there is no connection to Node, there will be an attempt to create one. If this fails, a nodedown message is delivered.
Nodes connected through hidden connections can be monitored as any other node.
Failure: badargif the local node is not alive.
其他模块如global, pg2, mnesia都利用这个monitor_node提供的语义来实现更上层的逻辑。那么上面提到的引荐机制正是global模块实现的,它的目的是提供集群层面的名称和进程的映射关系,所以它需要全联通。
学过中学数学的同学都知道系统总的通道的数目是N*(N-1)/2, 随着N的增长,这个数目会急速上升,见下图。
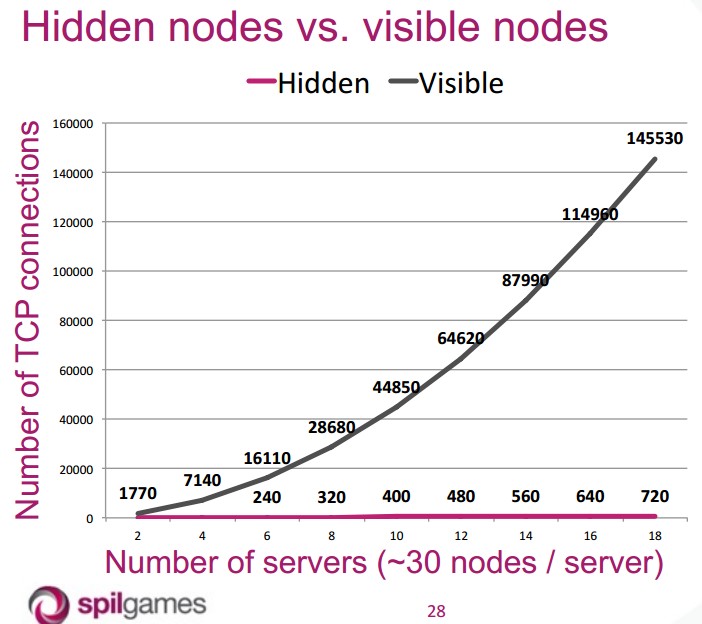
这个对集群的规模有致命的破坏作用。 这么多链接需要耗用很多资源,更坏的是,erlang为了检测节点的存活,需要定期发心跳包来检查,一分钟一个tick, 这会造成大量的网络风暴。
那么我们如何来避免这个事情呢?
Read more…
Post Footer automatically generated by wp-posturl plugin for wordpress.
Recent Comments